Table of Contents
- Arctic Underwater Robotics Field Work
- Detection of Maritime Objects
- Fish Classification
- Localisation of a Sonar Transmitter in shallow water using Time-Reversal
- Handwritten Letters Classficiation
- Simulation of Drifter Advection compared to Real-Life Data
- Trajectory Prediction of Unmanned Aerial Vehicles for a Telescope System
- HDD Based Line Follower
- Transmission Box
- Pong Clone
- Chess Board
Arctic Underwater Robotics Field Work August 2023
field work in Svalbard
arctic_underwater_robotics - During my course at the University Center in Svalbard, I participated in a field mission to sample water columns in fjords surrounding Longyearbyen. We obtained side-scan sonar data, as well as sea-water properties during multiple dives near local glaciers.
Detection of Maritime Objects January 2023
detecting sailboats at sea
object_detection - A Faster R-CNN is trained to detect and categorize maritime objects, such as sailboats and buoys, at sea. Each detection is visualised with a bounding box and relevant metrics are displayed next to the image category. For this purpose images are filtered from the Pascal VOC for training.

Fish Classification December 2022
fish classification using CNNs
fish_classification - This project involves using CNNs and PyTorch to classify fish images into different categories. We will train a model on a dataset of fish images and use it to predict the class of new, unseen images. Finally its performance is compared to a fine-tuned AlexNet and a MobileNet to explore Transfer Learning.

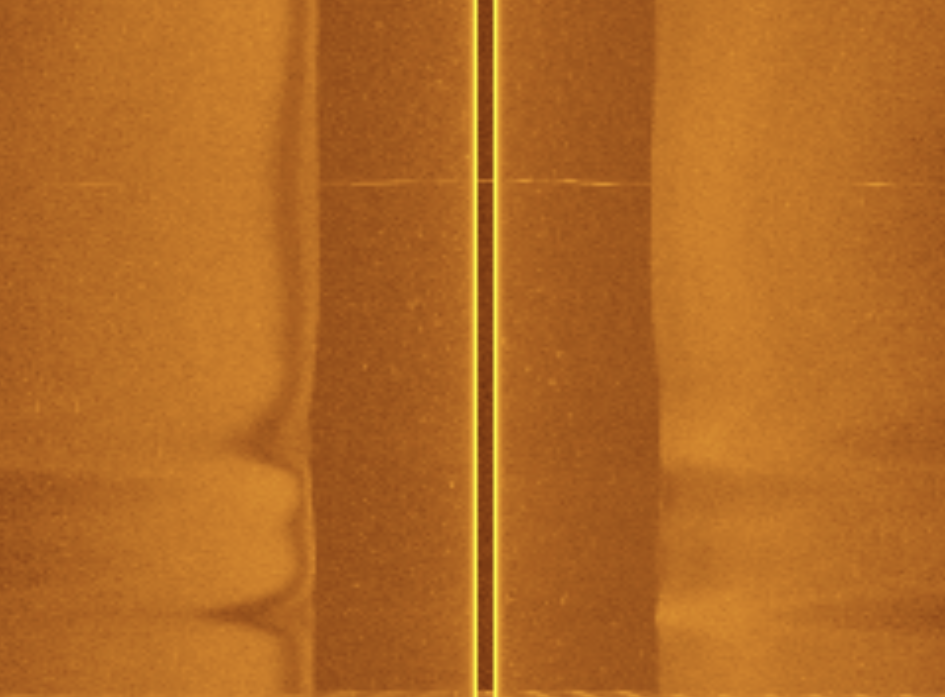
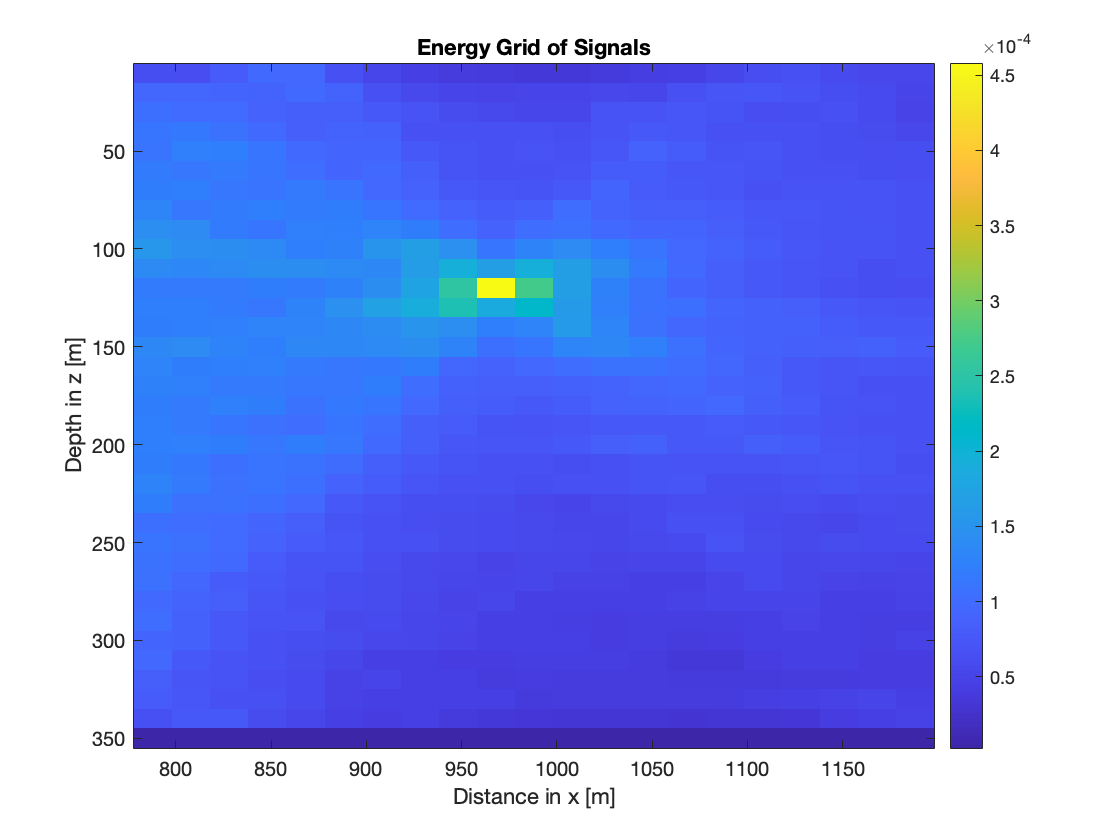
Localisation of a Sonar Transmitter in shallow water using Time-Reversal December 2022
sonar localisation
sonar_localisation - A sonar transmitter is located in shallow waters, using the knowledge of the Green’s function of the environment, taking into account reflections at the fluid interfaces. Assuming a stable environment the signals recorded by an array of receivers is setn back to the source, creating a peak at the source’s original location.
Handwritten Letters Classficiation November 2022
MNIST classification using MLPs and pytorch
mnist_class- This project involves using MLPs and PyTorch to classify handwritten letters from the MNIST dataset.

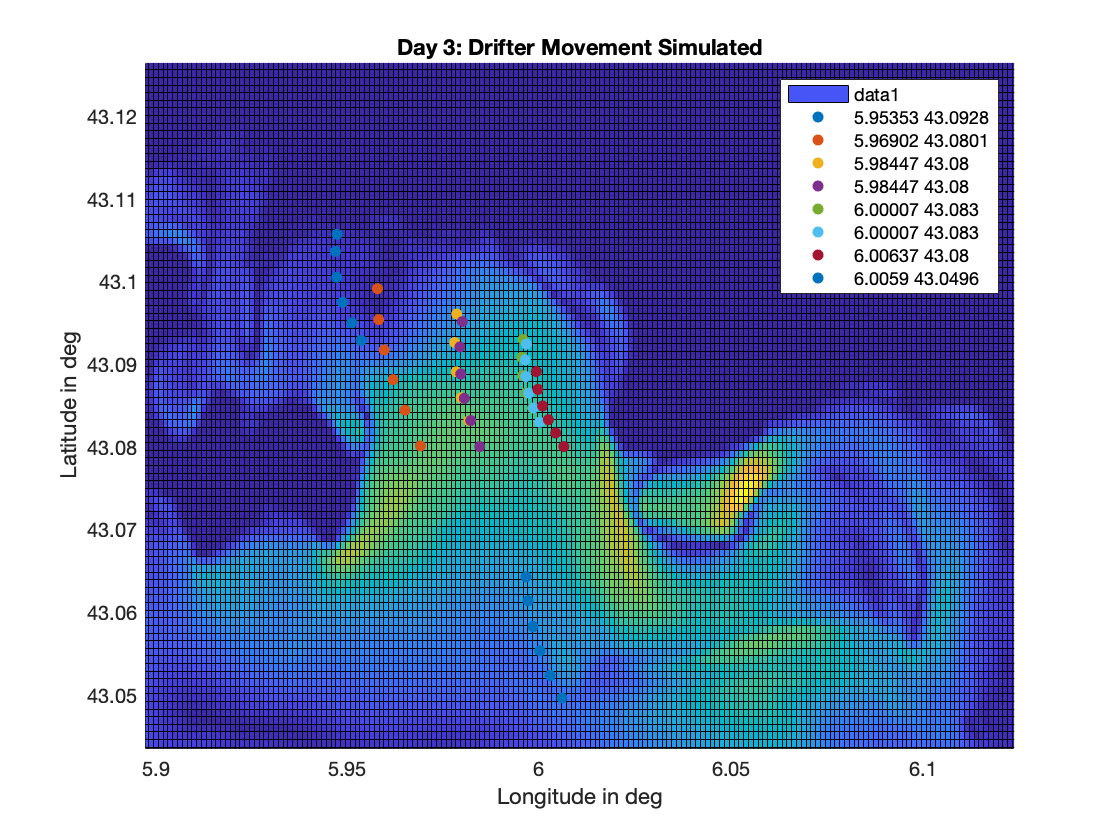
Simulation of Drifter Advection compared to Real-Life Data October 2022
drifter simulation
drifter_simulation - A simulation of drifter advection is created for the Toulon Bay. Its result is then compared to the movement of drifters set out at sea during a mission with Ifremer. Even during the time-span of five hours, the current velocities, sampled once per hour, could be used to predict drifter movement.
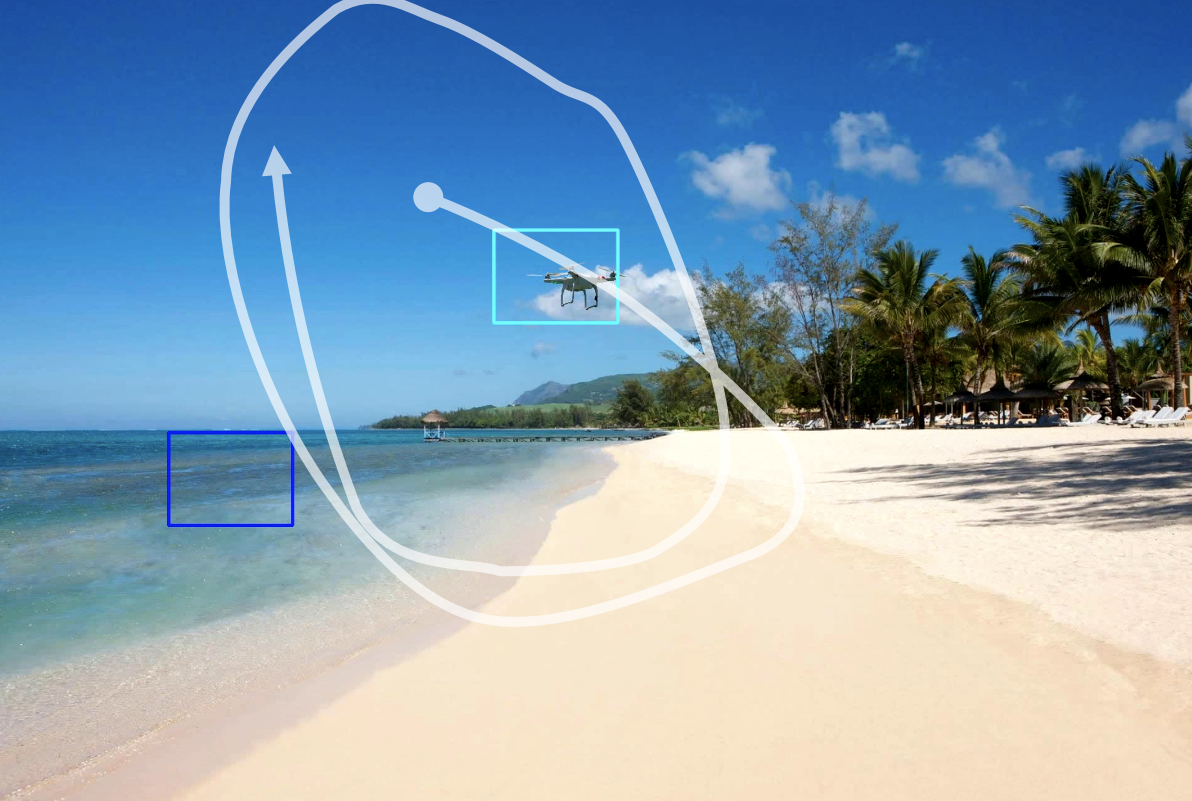
Trajectory Prediction of Unmanned Aerial Vehicles for a Telescope System August 2022
bachelor thesis @ TU Vienna
trajectory_prediction - For my bachelor thesis I implemented a method for tracking UAVs for cases of malfunctioning object trackers and object occlusion, comparing the performance of Kalman and Particle Filter based approaches. I achieved a significant improvement in robustness for occluded and noisy trackers.
HDD Based Line Follower March 2022
electrical wiring and low level programming
line_follower - Design, Implementation, and real-life testing of HDD-based Line-Follower involving writing code in C for microcontrollers, wiring of electrical components and choice of motors/sensors.

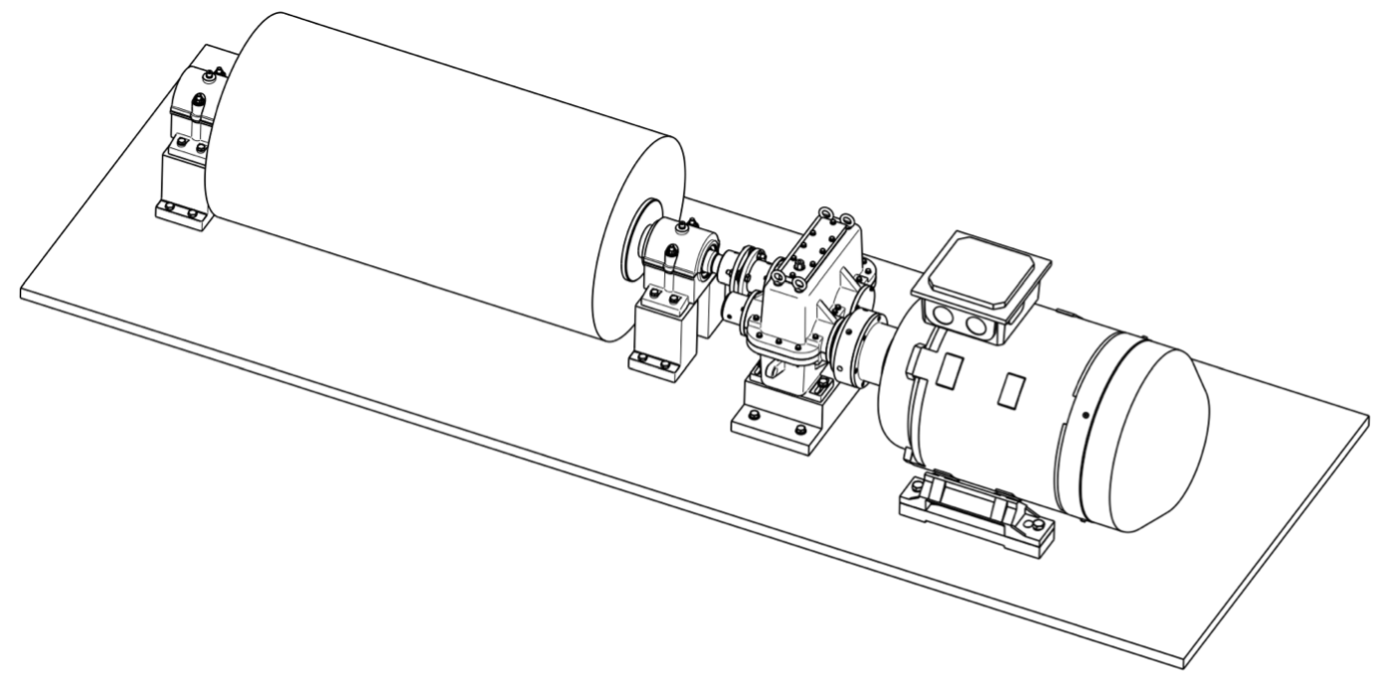
Transmission Box October 2021
design and calculations for a transmission box
transmission_box- Design, Calculations and Dimensioning of a Transmission Box, clutches and roll for roll forming according to DIN and ISO standards. As the team leader I was responsible for the calculations and design of parts of the transmission as well as the hydraulically actuated multi-plate clutch and for project management.
Pong Clone September 2021
working with microcontrollers and sensors
pong_clone - I built a pong clone running on a STM32 using a Nokia 5510 display and tilt sensors for controls. The microcontroller software architecture is built on interrupts, thereby saving energy.

Chess Board April 2021
3D printing a chessboard
chessboard - This project involves creating chess pieces using CAD software for 3D printing. The pieces are designed Fusion 360 after which the Ender-3 is used for 3D printing.